Настройка квадрокоптера с GPS на ПК Omnibus.
Приступаем к завершению сборки квадрокоптера с GPS своими руками. Начало смотрите здесь.
Установка LED подсветки на квадрокоптер.
Во-первых, обозначу изменения с прошлой части. Мне, наконец-то, пришли LED панели, установил их сзади квадрокоптера. С подключением панелей трудностей не возникло, плюс и минус берем любые 5-вольтовые с платы, а сигнал LED я снял с коннектора вот таким вот образом.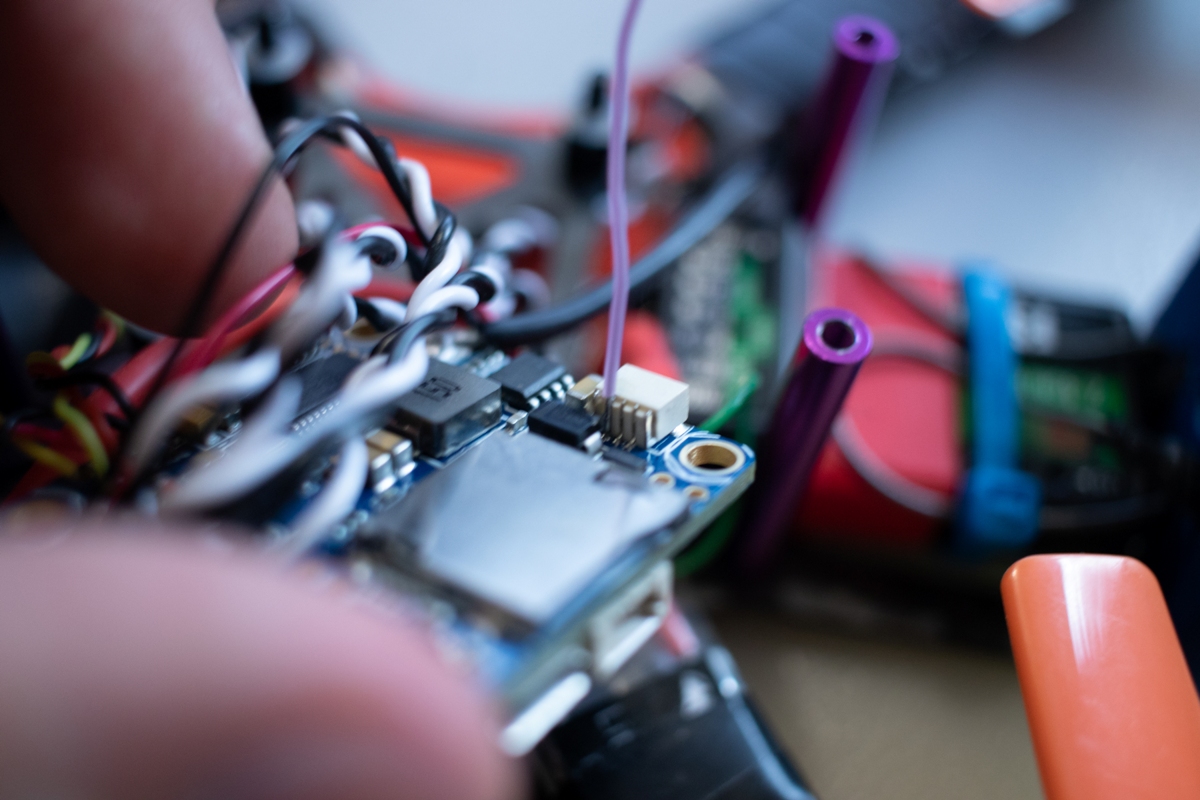 Теперь выводим провода.
Теперь выводим провода.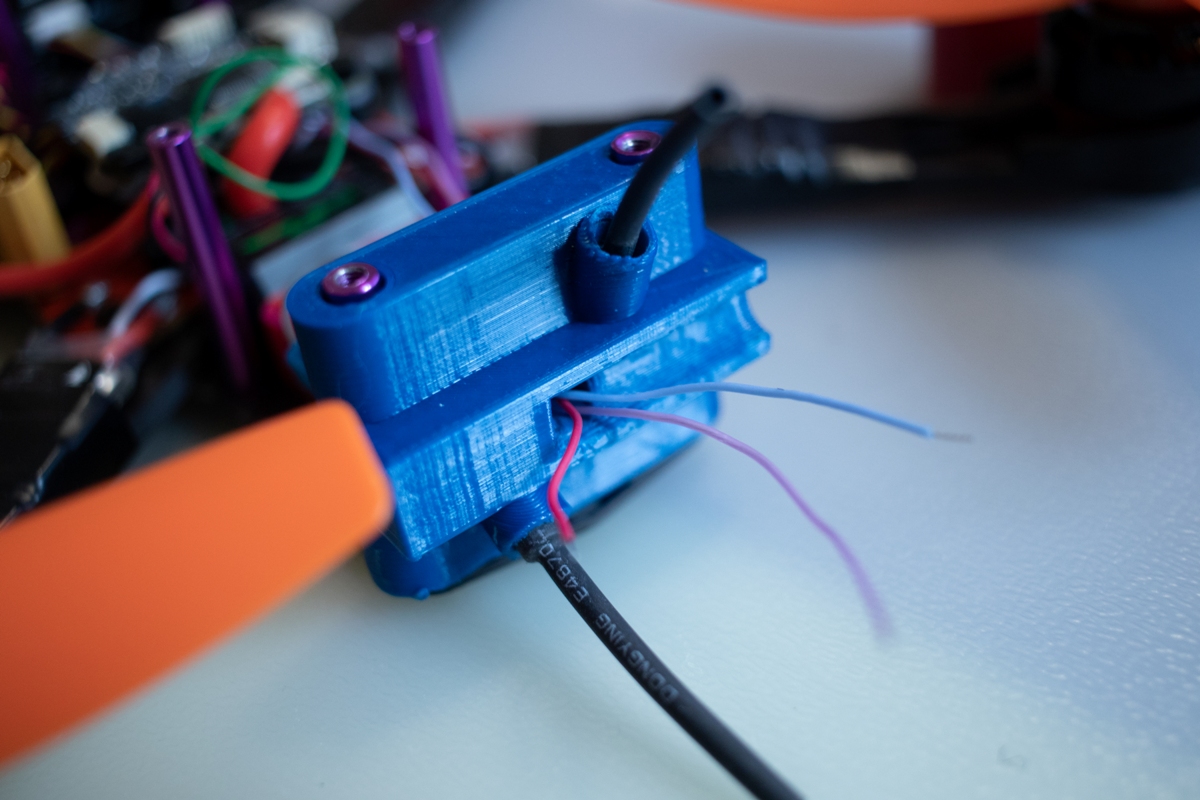
Припаиваем LED панель (со стороны Di). Со стороны Do (out) можно добавить еще панелей при желании. То есть несколько панелей соединяются последовательно.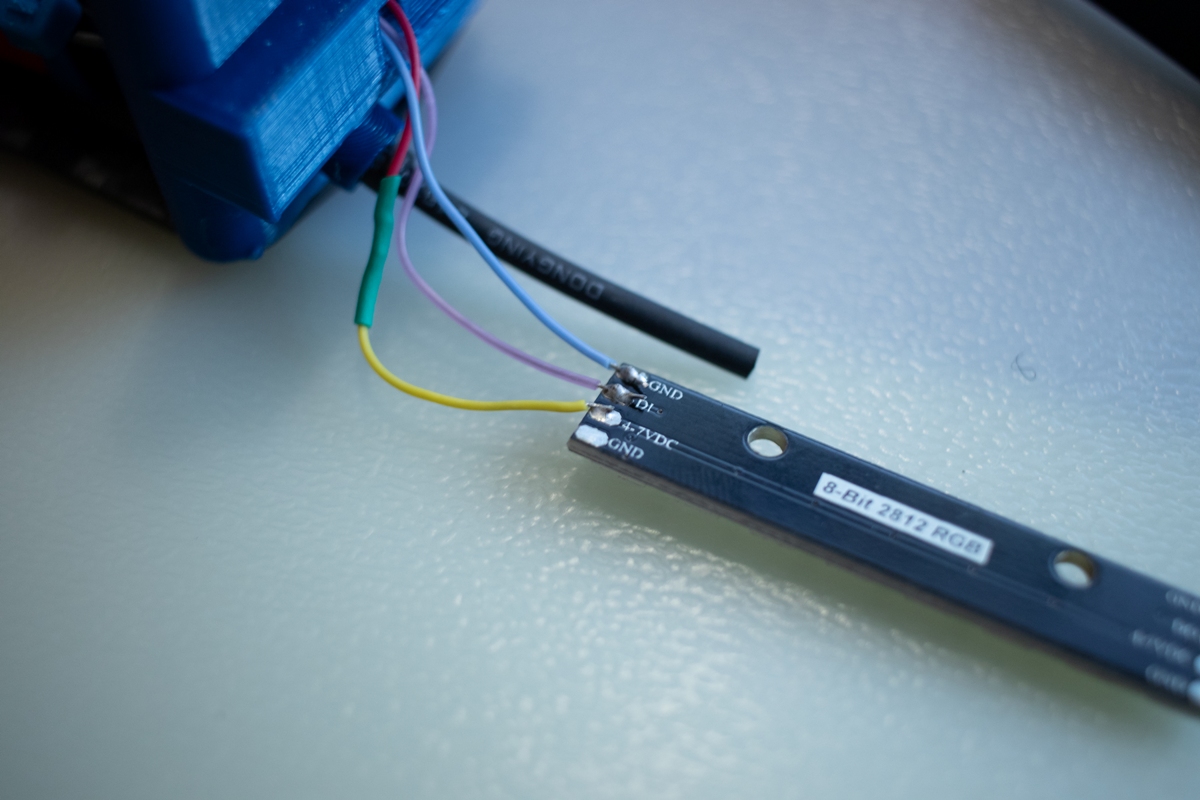
Проверяем работу (настройки INAV смотри ниже) и аккуратно приклеиваем к квадрокоптеру.

Прошивка полетного контроллера квадрокоптера с GPS (INAV).
Во-первых, клоны Omnibus чаще всего приходят к нам с предустановленной прошивкой BetaFlight. Нам с вами нужно залить в полетный контроллер прошивку INAV.
Для этого, а также для последующей настройки скачиваем Inav Configurator.
Далее скачиваем и устанавливаем все необходимые драйвера, и прошиваем наш полетный контроллер точно также, как в этой статье. Разница лишь в том, что работать вы будете в INAV Configurator вместо Betaflight. Они имеют очень схожий интерфейс. Для прошивки на момент написания статьи я выбрал следующие плату и версию прошивки
Настройка квадрокоптера с GPS (INAV).
Далее я опишу Вам самые основные настройки квадрокоптера (в основном скриншоты), которых будет достаточно для того, чтобы он без проблем полетел. На некоторых заострю ваше внимание. Чтобы наиболее полно изучить все настройки INAV рекомендую обратиться к документации на GitHub.
Ну вот мы прошили квадрокоптер, подключили к INAV Configurator. Первая вкладка, которую мы увидим — Setup и на ней будут видны два красных крестика, говорящие нам о том, что нужно откалибровать акселерометр и, в дальнейшем, компас.
Вообще блок Pre-arming checks на этой вкладке показывает все ли в порядке с подключениями и настройками. Если по какой-либо причине после всех настроек у вас квадрокоптер не будет Arm, то идите на эту вкладку и выясняйте причины.
Идем на вкладку Configuration и выбираем AUTO там, где указано. Здесь и далее после каждой операции не забываем сохранять и перезагружать.
Переходим на вкладку Calibration и по очереди калибруем акселерометр и компас. На вкладке все написано и даже нарисовано, что и как делать, поэтому воспользуйтесь переводчиком. Ничего сложного.
Если вы все сделали правильно, то на вкладке Setup в блоке Pre-arming checks все будет зелёное.
Вкладка порты (инициализируем IBUS и GPS модуль).
Вкладка Mixer. Кстати, здесь вы всегда сможете подсмотреть правильное направление вращения моторов.
Вкладка Outputs. Во-первых, снимаем пропеллеры. Во-вторых, делаем 2 первых шага как на картинке ниже. В-третьих, подключаем аккумулятор и проверяем корректность работы моторов, а также правильность направления вращения как на схеме. Если вдруг какой-либо из моторов вращается не в ту сторону, обращайтесь к этой статье. В ней подробно описано как изменить направление вращения мотора в BLHeli Configurator.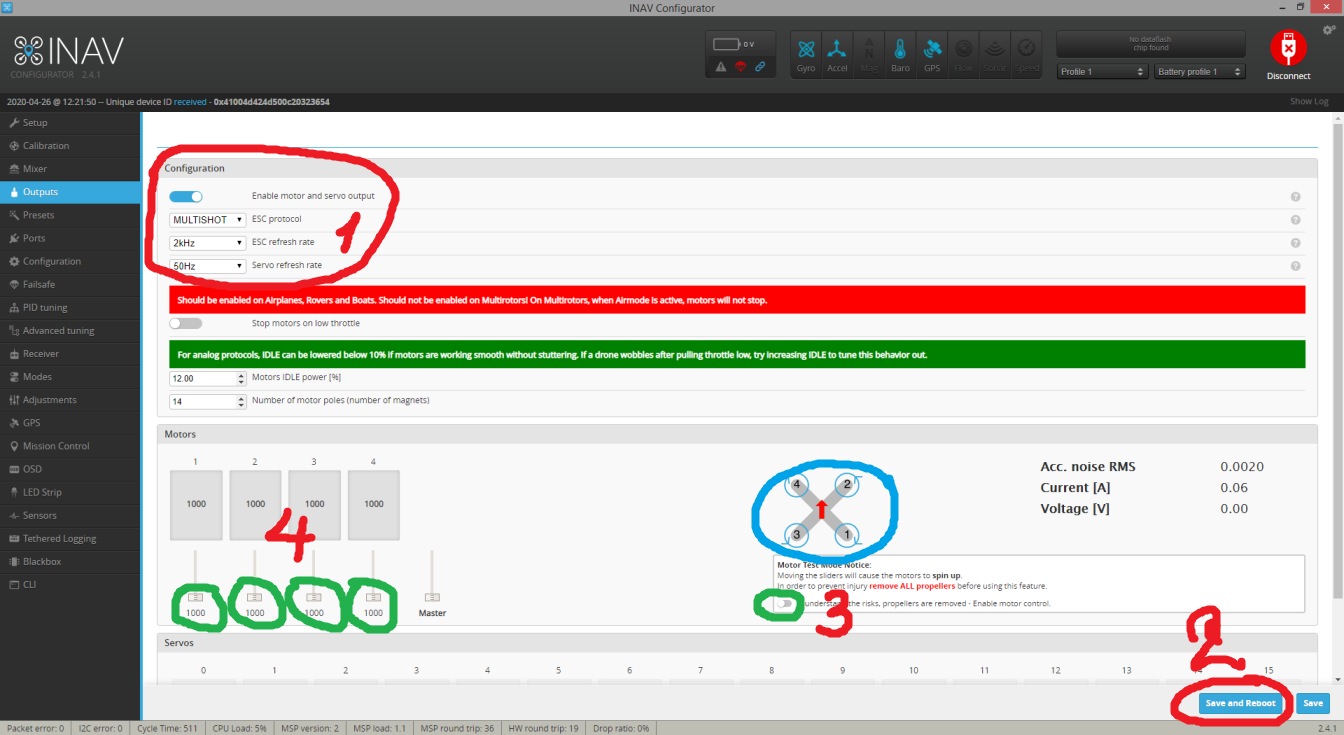
Снова обратимся к вкладке Конфигурация. На рисунке ниже настройки касаются приемника, датчика тока, GPS модуля и компаса. Настройка MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.

Отдельно про Permanently enable AIRMODE.
Хочу предостеречь вас от включения опции Permanently enable AIRMODE пока вы тестируете и настраиваете квадрокоптер дома. Эта опция, при установленных пропеллерах, может хорошенько потрепать вам нервы и даже испортить здоровье.
Если вдруг вы решите придержать руками квадрокоптер с включенной опцией при первых испытаниях, то столкнетесь с тем, что квадрокоптер бесконтрольно будет наращивать обороты моторов. Вплоть до максимальных значений, независимо от положения стика газа.
Обычно люди сразу думают, что это неполадки с полетным контроллером или передатчиком. Но на самом деле так работает эта функция. Пока квадрокоптер не сдвинется хотя бы на миллиметр для стабилизации, полетный контроллер будет увеличивать обороты. Имейте это ввиду. В поле можете включить ее снова.
Если вы сделали все вышеописанное, то настраиваете FailSafe, OSD и полетные режимы на свое усмотрение.
Часто случается, что клоны Omnibus показывают непонятные иероглифы в OSD. Попробуйте поменять шрифт, мне помогло.
Удачных полетов!



Спасибо огромное!Прям вот выручили своей статьей,особенно с Permanently enable AIRMODE))))Долго не мог вкурить,чего это у меня квадрик взбесился и на газ не реагирует)))))
Спасибо за добрые слова)
Где менять шрифт?
На вкладке настройки OSD